
链传动的过程中,会在松边出现悬链线状态,为了更好的表现出这种状态,我们首先需要在NX中描绘出悬链线,根据双曲余弦函数调整悬链线参数a,得到一根合适状态的悬链线。

平移到原点的悬链线
选择合适的节距,本案例为了方便演示,采用了非标准节距P=45mm,链节数Lp=50,考虑链传动均匀磨损,选用互质的Z1=25、Z2=17为大小链轮齿数,根据公式d=P/sin(180°/Z)计算出链轮分度圆直径,根据公式a=(P/4)*(Lp-(Z1+Z2)/2+SQRT((Lp-(Z1+Z2)/2)^2-8*((Z2-Z1)/2*Pi())^2))计算出理论中心距,整个链传动分度线布局如下图。
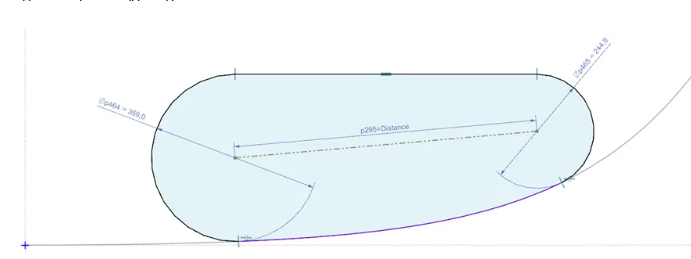
链传动分度线布局
设计好两节标准链节,如下图。
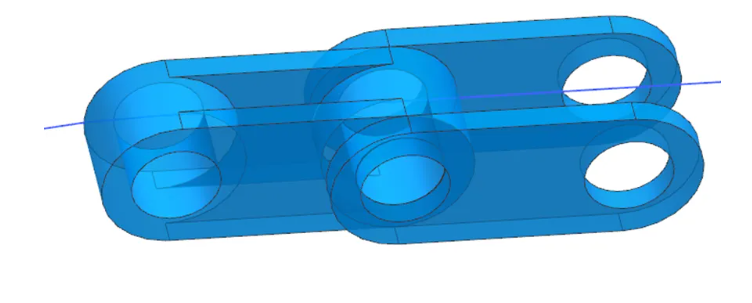
完成整个链条的布局。
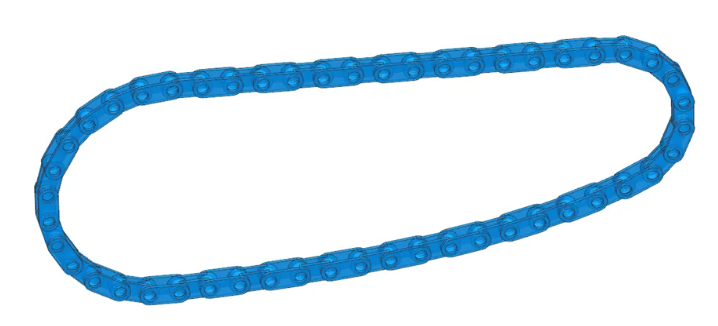
链传动整个链布局
接下来完成链轮的设计,可以设计到同一个零件里,也可以设计成装配结构。
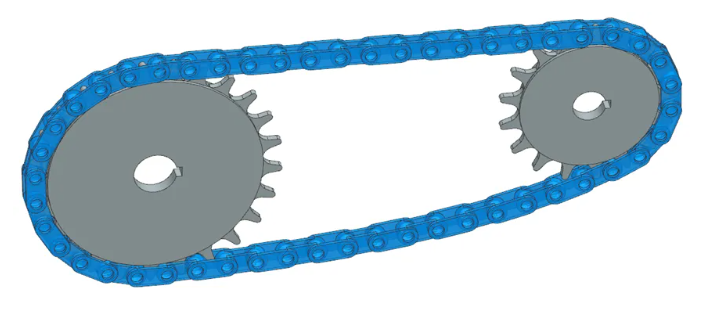
完成链传动系统设计
切换到Animation Designer的Tab栏,定义好各个Rigid Group,这个时候,只需要定义一节链的运动副关系:Point on Curve Joint,如下图。
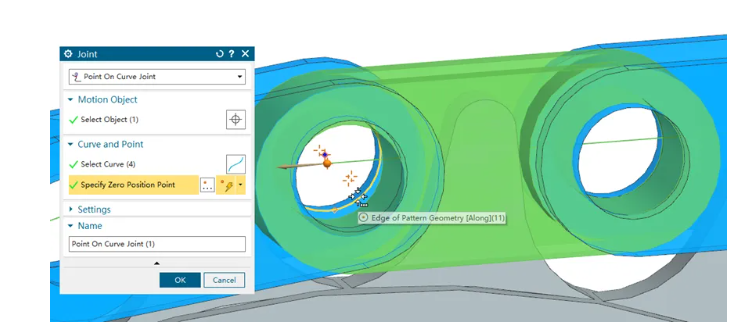
定义一个链节的运动副
通过Point on Curve Chain来定义其他49节链节的运动副,非常简单,选择最开始定义了运动副的那节链节,然后框选上另外49节链节即可,其他的链节将会跟随前面链节的运动而进行运动。
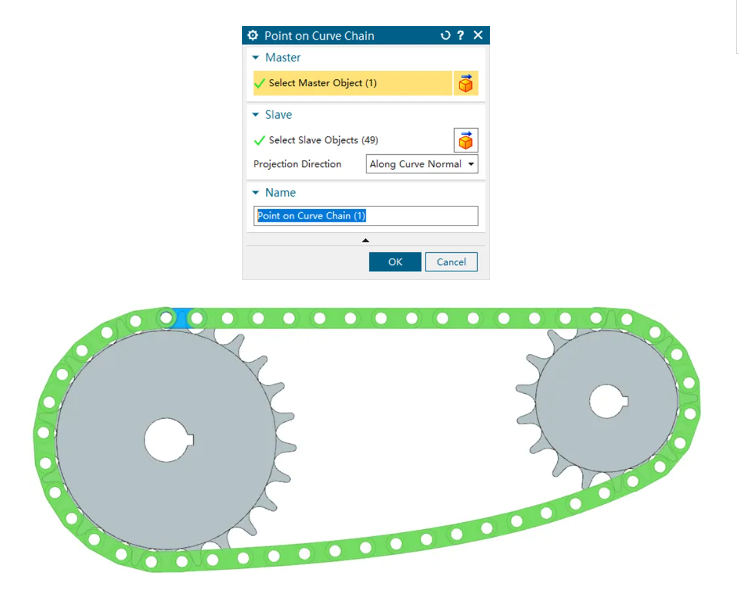
Point on Curve Chain定义其他49节链节的运动副
对链轮的驱动轮定义好驱动,其他运动副用相应的Relations来定义耦合运动,并设置好正确的传动比。
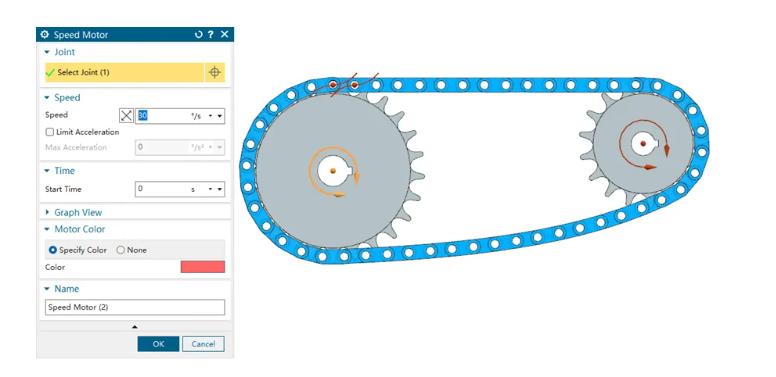
定义好运动副驱动和耦合运动
NX Animation Designer最大的优势就是无需等待,点击Play即刻得到仿真,可以查看时序、传动比、速度、碰撞等各个运动仿真要素正确与否,无需做任何模块切换,即可随时调整CAD模型或者运动仿真参数,可以既轻松又快速的完成设计和运动学仿真。
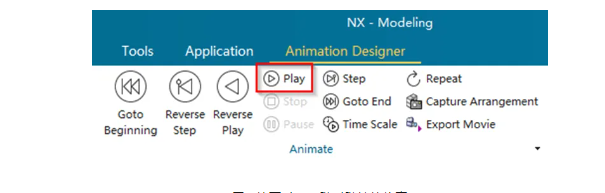
按下Play,随时随地的仿真
让我们最后来看一下链传动运动学仿真结果。













暂无评论内容